



技術支持
KUKA的零點復歸測試——庫卡機器人|庫卡機械臂|庫卡配件
庫卡機器人有安全選項功能SafeOperation,常用在人機協作、工件無需中轉直接就位、取代傳統的軸運動范圍監控裝置等領域。SafeOperation有以下功能:
①安全監控能滿足 16 個用戶自定義的與軸相關的或笛卡爾監控空間
②安全監控用戶自定義的單元范圍
③在到達區域邊界前制動 (BBRA)
④安全監控與軸相關的速度
⑤安全監控空間特有的速度
⑥安全監控笛卡爾速度
⑦可用安全的 TCP 為***多 16 件安全工具制作模型
⑧可利用安全控制系統實現安全停止
⑨***多 6 個軸組的安全運行停止
⑩可連接到上級控制系統,例如安全 PLC
用于激活監控的安全輸入端
監控狀態信息的安全輸出端
用于驗證零點標定的可配置程序
通過 KUKA 參考點開關進行零點復歸測試
通過外部系統以及借助外部零點標定確認進行零點復歸測試
在進行零點復歸測試時,在合適的參考點位置上檢查所保存的軸電機參考點位置是否與該軸的實際機械位置一致。
以下介紹KUKA參考點開關及零點復歸測試。
一、發生以下事件后需要進行零點復歸測試:
①機器人控制系統重啟(內部要求)
②重新調整機器人(內部要求)
③重新配置 E/A-驅動程序(內部要求)
④僅在通過參考點開關進行零點復歸測試時有關:外部輸入端
$MASTERINGTEST_REQ_EXT,例如由 PLC(外部要求)
在內部要求零點復歸測試時,機器人控制系統發出以下信息: 必須進行調零(內部) 。機器人在未進行零點復歸測試和零點標定確認的情況下可繼續運行2 小時(監控時間)。
監控時間過后,庫卡機器人以安全停止 1 停下,機器人控制系統發出以下確認信息: 確認調零時間間隔已過 。確認后,機器人還能繼續運行 2 小時。
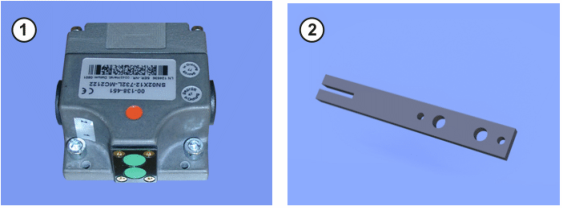
二、硬件—參考點開關組件
參考點開關組件由以下元件組成:
①電感式參考點開關 XS Ref; ②直形或彎型觸發板
③參考點開關連接導線 X42 - XS Ref;④參考點開關插頭 X42
三、通過參考點開關進行零點復歸測試
在零點復歸測試時駛至特定的參考點位置,并借助參考點開關檢查機器人和特定附加軸的實際位置是否與安全配置中示教的參考點位置一致。如果當前位置與參考點位置的偏差過大,則零點復歸測試失敗。機器人通過安全停止 1 停止,并且只能在 T1 運行方式下運行。
1、安裝并連接參考點開關組件
2、配置輸入信號$MASTERINGTEST_REQ_EXT。
該信號用于零點復歸測試外部要求的輸入信號,已在目錄 KRC:\ROBOTER\ KRC\STEU\MADA 下的文件$machine.dat 中進行了聲明且必須分配給一個合適的輸入端。默認設置下,信號位于 $IN[1026]。
3、 在文件“masref_user.dat”和安全配置中配置待檢查的參考點組。
4、在程序“masref_user.src”中示教零點復歸測試位置。
5、在參考點開關被工具的鐵磁體部分觸發時或在更換工具之后:檢查參考點位置的準確度。
6、手動啟動零點復歸測試:手動啟動程序“masref_main.src”。
選擇程序“masref_main.src”并運行至程序結束。
該程序在目錄R1\System下。
文章來源網絡,如有侵權請聯系刪除
